Motion in a non-inertial frame
Linear acceleration
Problem:
At t = 0 a 100 g ball is thrown upward with initial speed v
= 2 m/s in an open-platform elevator which at that time is moving downward with
v = 3 m/s and accelerating downward with an acceleration of magnitude a = 3 m/s2.
A drag force with magnitude Fdrag = 0.8 N acts on the ball.
(a) What is the net force Fnet acting on the ball in the
frame of the elevator just after it has been thrown?
(b) What is the net force Fnet acting on the ball in the
frame of a person standing on the ground just after it has been thrown?
Solution:
- Concepts:
Motion in an accelerating frame
- Reasoning:
Fictitious forces appear in an accelerating frame.
In the inertial frame the ball moves downward just after it is thrown, the
drag force which opposes the relative motion of the ball and the air
therefore points upward.
- Details of the calculation:
Let the upward direction be the positive y -direction.
(a) Fnet = mg - ma +
Fdrag
= (-mg + ma + Fdrag) j = (-0.1*6.8 N + 0.8 N)
j
= 0.12 N j. The ball accelerates upward in the frame of the
elevator.
(b) Fnet = mg +
Fdrag = (-mg +
Fdrag) j = (-0.1*9.8 N + 0.8 N)
j = 0.18 N
j.
The ball accelerates downward in the frame of the person on the ground.
Problem:
A hauling truck is traveling on a level road. The driver suddenly applies the
brakes, causing the truck to decelerate by an amount g/2. This causes a box in
the rear of the truck to slide forward. If the coefficient of sliding friction
between the box and the truck bed is (1/3), find the acceleration of the box
relative to
(a) the truck and
(b) the road.
Solution:
- Concepts:
Motion in an accelerating frame.
- Reasoning:
In an accelerating frame fictitious forces appear. The net force in such
a frame is
F = Finertial - ma, where
a is the
acceleration of the frame.
- Details of the calculation:
This is a one-dimensional problem. Let the positive direction be the
direction of the trucks initial velocity.
(a) F = -mg/3 + mg/2 = +mg/6. The acceleration of the box relative to the
truck is g/6.
(b) F = -mg/3. The acceleration of the box relative to the road is -g/3.
Problem:
(a) An elevator in which a woman is standing moves upward at 4 m/s. If the
woman drops a coin from a height 1.4 m above the elevator floor, how long does
it take the coin to strike the floor? What is the speed of the coin relative to
the floor just before impact?
(b) Now assume that the elevator is moving downward with zero initial velocity
and acceleration of 1 m/s2 at t = 0, the women releases the coin at t
= 1 s. How long does it take the coin to strike the floor? What is the speed
of the coin relative to the floor just before impact?
Solution:
- Concepts:
The equations of motion in an inertial and in an
accelerating frame.
- Reasoning:
For part (a) the elevator is an inertial frame and for part (b) it is an
accelerating frame.
- Details of the calculations:
(a) The elevator is an inertial frame. The time it takes the coin to reach
the floor is
t = (2h/g)½ = 0.53 s.
The speed just before impact is v = gt = 5.24 m/s.
(b) Now the elevator is an accelerating frame.
In non-inertial frames fictitious forces appear.
Consider a particle moving with velocity v in a reference frame K
which moves with velocity V(t) relative to the inertial frame K0.
The equations of motion are
mdv/dt = mg - mdV/dt .
Here dv/dt = g - 1 m/s2 = 8.8 m/s2 = g', downward.
t = (2h/g')½ = 0.56 s.
The speed just before impact is v = g't = 4.96 m/s.
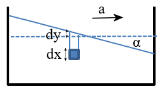
Problem:
A water tank sits on a horizontal truck bed.

The truck accelerates with uniform acceleration a = 2.5 m/s2 in the
positive x-direction. Find the angle α the water's surface makes with the
horizontal.
Solution:
- Concepts:
Non-inertial frames
- Reasoning:
The truck is a non-inertial frame
In an accelerating frame fictitious forces appear. The net force in a linearly
accelerating frame is
F = Finertial - ma, where
a is the
acceleration of the frame.
- Details of the calculation:
Here F = mg - ma.
Let the y-axis point upward. Then F = -m(9.8 m/s2
j +
2.5 m/s2 i).
The water's surface is perpendicular to F.
It slopes upward towards the back of the truck. The slope dy/dx = -a/g
= -0.255 = tan(α).
α = 165.7o or -14.3o.
Or, observe a volume dV = (dx)3 in the accelerating tank from
an inertial frame.
The pressure in the liquid depends on the depth
below the surface. The pressure on the left side is higher that the pressure on
the right side of dV by an amount ρg|dy|.
The net force on dV is F = ρgdy(dx)2. It accelerates the water in dV.
We have F = ma.
ρgdy(dx)2 = ρ(dx)3a. |dy|/dx = a/g is the
magnitude of the slope. The slope is negative.
Rotating frames
Problem:
Write F = ma in a rotating coordinate system and identify
Coriolis and centrifugal terms.
Solution:
- Concepts:
Motion in a non-inertial frame
- Reasoning:
A rotating coordinate system is a non-inertial frame. Fictitious forces
appear.
- Details of the calculation:
The relationship between the time derivatives of any vector
A in a
fixed, inertial frame and in a frame rotating with constant angular velocity
Ω is
(dA/dt)fixed = (dA/dt)rotating +
Ω
× A.
Therefore:
(dr/dt)fixed = (dr/dt)rotating +
Ω
× r.
The relationship between the velocity vi in the
inertial frame and the velocity v in a frame rotating with constant
angular velocity Ω is
vi = v + Ω ×
r.
Differentiating again we have
(dvi/dt)fixed = (dv/dt)fixed
+ Ω × (dr/dt)fixed.
Inserting (dr/dt)fixed from above we have
m(dvi/dt)fixed =
Fi = m(dv/dt)fixed
+ mΩ × v + mΩ ×
(Ω × r).
Now we use
(dv/dt)fixed = (dv/dt)rotating +
Ω
× v
to obtain the equations of motion in the rotating frame.
The equations of motion in the rotating frame therefore are
mdv/dt = Fi - 2mΩ ×
v - mΩ × (Ω
× r).
If Fi is derivable from a potential then
Fi
= -∂U/∂r.
2m(v × Ω) = -2m(Ω
× v) = Coriolis force
m(Ω × r) × Ω = -mΩ
× (Ω ×
r) =
centrifugal force
Problem:
A disc of radius R is spinning in the horizontal plane with a constant
angular speed Ω. A ladybug walks along the radius of the spinning disc,
traveling from the center of the disc toward the edge. The ladybug maintains a
constant speed v relative to the disc.
What is the acceleration of the ladybug at the instant it reaches the edge of
the disc?
Solution:
- Concepts:
Motion viewed from an inertial and a non-inertial frame
- Reasoning:
In non-inertial frames fictitious forces appear.
- Details of the calculation:
Consider a particle moving
with velocity v in a reference frame K which moves with velocity
V(t)
relative to the inertial frame K0 and rotates with angular velocity
Ω(t). The equations of motion are in the non-inertial frame are
mdv/dt =
Finertial - mdV/dt + mr × dΩ/dt
- 2mΩ × v - mΩ × (Ω ×
r).
Here
-mdV/dt = fictitious force due to acceleration of frame,
mr × dΩ/dt = fictitious force due to non-uniform rotation of
frame,
-2mΩ × v = Coriolis force,
-mΩ × (Ω ×
r) = Centifugal force.
In the inertial frame we have
Finertial = mdv/dt + mdV/dt - mr × dΩ/dt
+ 2mΩ × v + mΩ × (Ω ×
r).
Details of the calculation:
For the bug dv/dt = dV/dt = dΩ/dt = 0.
Finertial = 2mΩ ×
v + mΩ × (Ω ×
r).
In the inertial frame the magnitudes of the tangential and radial force are
Ftangential = 2mvΩ, Frad = mΩ2r.
In the inertial frame the magnitudes of the tangential and radial acceleration
are therefore given by
atangential = 2vΩ, arad = Ω2r
At the instant the bug reaches the edge of the disk
a = (atangential2 + arad2)½
= Ω(4v2 + Ω2R 2)½.
Problem:
An object on a planar platform moves in an elliptical trajectory described by
x(t) = x1 + x2 cos(αt), y(t)
= y1 + y2 sin(αt),
where x and y are measured with respect to a coordinate system fixed on the
platform. The platform is rotating with respect to an inertial coordinate
system XYZ. The two coordinate systems XYZ and xyz are the same at time t = 0.
The axis of rotation is the Z-axis, but the angular speed of rotation is
fluctuating with time and is given by
ω(t) = ω1 + ω2 sin(βt).
Find an expression for the velocity components Vx and Vy
of the object in the inertial frame at time.
Solution:
- Concepts:
Rotating
coordinate systems, vfixed =
vrot +
ω
× r
- Reasoning:
The position of an object as a function of time is
given in a non-inertial (rotating) frame. We are asked to find the velocity
of the object in an inertial frame.
- Details of the calculation:
Assume the platform is rotating
counterclockwise. Then
 ,
,
 .
.
Given : x(t) = x1 + x2 cos(αt),
y(t) = y1 + y2 sin(αt)
Therefore: dx/dt
= -α x2 sin(αt), dy/dt = α y2 cos(αt)
Given :
ω(t) = ω1 + ω2 sin(βt), θ(t= 0) = 0
Therefore:
θ(t) = ω1t + (ω2/β)(1 - cos(βt))
Vx = dX/dt
= d(cosθ x - sinθ y)/dt
= cosθ dx/dt - x sinθ dθ/dt - sinθ dy/dt - y cosθ
dθ/dt
= cosθ dx/dt - sinθ dy/dt - (x sinθ + y cosθ)dθ/dt
Vy
= dY/dt = d(cosθ y + sinθ x)/dt
= cosθ dy/dt - y sinθ dθ/dt + sinθ dx/dt
+ x cosθ dθ/dt
= sinθ dx/dt + cosθ dy/dt + (x cosθ - y sinθ)dθ/dt
Inserting:
Vx = -cos(ω1t + (ω2/β)(1 -
cos(βt)))α x2 sin(αt) - sin(ω1t + (ω2/β)(1
- cos(βt)))α y2 cos(αt)
- [(x1+x2 cos(αt))
sin(ω1t + (ω2/β)(1 - cos(βt))) + (y1+y2
sin(αt))(cos(ω1t + (ω2/β)(1 - cos(βt)))]
*( ω1
+ ω2 sin(βt))
Vy = -sin(ω1t + (ω2/β)(1 - cos(βt)))α x2
sin(αt) + cos(ω1t + (ω2/β)(1 - cos(βt))) α y2
cos(αt)
+ [(x1+x2 cos(αt)) cos(ω1t
+ (ω2/β)(1 - cos(βt))) - (y1+y2
sin(αt))(sin(ω1t + (ω2/β)(1 - cos(βt)))]
*( ω1
+ ω2 sin(βt))
Verify that vfixed =
vrot
+ ω × r.
ω = ωk.
ω × r =
-ω(t)y(t)i + ω(t)x(t)j
vfixed = (-α x2
sin(αt) -ω(t)y(t))i + (α y2 cos(αt) + ω(t)x(t))j
Here vfixed is expressed in terms of the coordinates
in the rotating system.
Change to the coordinates of the inertial system:
Vx = cosθ(-α x2 sin(αt) -ω(t)y(t)) - sinθ(α y2
cos(αt) + ω(t)x(t))
= -cosθ(α x2 sin(αt)) - sinθ(α y2
cos(αt)) - [cosθ y(t)) + sinθ x(t)]ω(t)
= -cos(ω1t + (ω2/β)(1
- cos(βt)))α x2 sin(αt) - sin(ω1t + (ω2/β)(1
- cos(βt)))α y2 cos(αt)
- [(x1+x2 cos(αt))
sin(ω1t + (ω2/β)(1 - cos(βt))) + (y1+y2
sin(αt))(cos(ω1t + (ω2/β)(1 - cos(βt)))]
*(ω1
+ ω2 sin(βt))
Similarly
Vy = sinθ(-α x2
sin(αt) -ω(t)y(t)) + cosθ(α y2 cos(αt) + ω(t)x(t))
=
-sinθ(α x2 sin(αt)) + cosθ(α y2 cos(αt)) - [sinθ y(t))
- cosθ x(t)]ω(t)
= -sin(ω1t + (ω2/β)(1 - cos(βt)))α
x2 sin(αt) + cos(ω1t + (ω2/β)(1 - cos(βt)))
α y2 cos(αt)
+ [(x1+x2 cos(αt)) cos(ω1t
+ (ω2/β)(1 - cos(βt))) - (y1+y2
sin(αt))(sin(ω1t + (ω2/β)(1 - cos(βt)))]
*(ω1
+ ω2 sin(βt))
Problem:
A brave physics student (an undergraduate, of course) climbs aboard a high
powered merry-go-round and goes to the center, at r = 0. At time t = 0,
the platform starts from rest (Ω = 0) and begins to spin about its vertical axis
with constant angular acceleration α. Also at time t = 0, the student
begins to crawl radially outward at constant speed v, relative to the platform.
Assuming the student does not slip, find the student's acceleration in the
inertial frame of an outside observer.
Solution:
- Concepts:
Motion viewed from an inertial and a non-inertial frame
- Reasoning:
In non-inertial frames fictitious forces appear.
Consider a particle moving with velocity v in a reference frame K
which moves with velocity V(t) relative to the inertial frame K0
and rotates with angular velocity Ω(t).
The equations of motion
are in the non-inertial frame are
mdv/dt =
Finertial
- mdV/dt + mr × dΩ/dt - 2mΩ ×
v - mΩ
× (Ω × r).
Here -mdV/dt = fictitious force due to
acceleration of frame.
mr × dΩ/dt = fictitious force due to
non-uniform rotation of frame.
-2mΩ ×
v = Coriolis force.
-mΩ × (Ω ×
r) = Centifugal force.
In the inertial
frame we have
Finertial = mdv/dt + mdV/dt
- mr × dΩ/dt + 2mΩ ×
v + mΩ × (Ω ×
r).
- Details of the calculation:
For our student dv/dt = dV/dt =
0.
Finertial = -mr × dΩ/dt + 2mΩ
× v + mΩ × (Ω ×
r).
In the inertial frame
Ftangential = (mrα + 2mvαt), Frad = -m(αt)2r,
Ftangential = 3mrα, Frad = -m(αt)2r.
In
the inertial frame the acceleration is therefore given by
atangential
= 3rα, arad = -(αt)2r.
Assume that the direction
of Ω is the z-direction.
Then
atangential =
3rα(ф/ф) and
arad = -(αt)2r.
Transforming from polar to Cartesian coordinates we have
(r/r) =
cosф i + sinф j, (ф/ф) = -sinф
i + cosф j.
Therefore ax = -(αt)2cosф - 3rα sinф, ay =
-(αt)2sinф + 3rα cosф.
r = vt, ф = ½αt2.
ax
= -(αt)2cos(½αt2) - 3vtα sin(½αt2), ay
= -(αt)2sin(½αt2) + 3vtα cosф(½αt2).
Problem:
On the surface of the earth an object is given an initial speed v on a
friction less surface at latitude λ. Show that the object will move in a circle
and find the radius of the circle for velocities small enough that the radius is
much smaller than the earth radius.
Solution:
- Concepts:
Motion in an accelerating frame
- Reasoning:
Assume an observer at mid latitudes λ = 90o - θ.
The object is observed by an observer in a uniformly rotating coordinate
system.
The equations of motion in a rotating coordinate system contain fictitious
forces.
mdv/dt = Finertial - mΩ × (Ω
× r) - 2mΩ ×
v = -mg +
N - mΩ × (Ω
× r) - 2mΩ ×
v.
-mΩ × (Ω ×
r) = centrifugal force.
-2mΩ × v = Coriolis force.
The force of gravity and the
radial component of the fictitious forces, giving mgeff ≈ mg, are balanced by the force of
constraint from the ground.
Let the z-axis of the coordinate system point into the -geff
direction. The Coriolis force and the centrifugal force both have a component ⊥to the z-axis.
- Details of the calculation:
Choose the coordinates as shown,
Fcoriolis⊥ = (2m Ωz dy/dt)
i - (2m
Ωz dx/dt) j. Here Ωz = Ωcosθ.
Fcentrifugal⊥ = mΩ2Rsinθcosθ
i = b i.
(Fcentrifugal⊥ is responsible for the oblateness of the earth.
It is therefore also balance by the normal force.)
Neglecting
Fcentrifugal⊥,
we have d2x/dt2
= 2Ωz dy/dt, d2y/dt2 = -2Ωz dx/dt.
dvx/dt =
2Ωzvy, dvy/dt =
-2Ωzvx.
Solutions: vx = A cos(ωt
+ φ), vy = -A sin(ωt
+ φ), ω = 2Ωz.
x = (A/(2Ωz)) sin(2Ωzt
+ φ), y = (A/(2Ωz))
cos(2Ωzt
+ φ).
This is motion in a circle, clockwise when looking down on the northern
hemisphere.
Ωz = (2π/day) cos(θ), v2 = vx2 + vy2
= A2, radius r = v/(2Ωz).
Problem:
A particle moves in a horizontal plane on the surface of the Earth. Show
that the magnitude of the horizontal component of the Coriolis force is
independent of the direction of the motion of the particle.
Solution:
- Concepts:
Motion in an accelerating frame
- Reasoning:
Assume an observer at mid latitudes.
The object is observed by an observer in a uniformly rotating coordinate
system.
The equations of motion in a rotating coordinate system contain fictitious
forces.
mdv/dt = Finertial - mΩ × (Ω
× r) - 2mΩ ×
v = -mg +
N - mΩ × (Ω
× r) - 2mΩ ×
v
-mΩ × (Ω ×
r) = centrifugal force
-2mΩ × v = Coriolis force
The radial terms sum to zero. The force of gravity and the radial
components of the fictitious
forces, giving mgeff ≈ mg, are balanced by the force
of constraint from the ground.
Choose the coordinate system as shown.
Let the z-axis of the coordinate system point into the -geff
direction.
Then the Coriolis force has a component ⊥ to the z-axis.
- Details of the calculation:
Fcoriolis⊥ = (2m Ωz dy/dt)
i - (2m Ωz
dx/dt) j. Here Ωz = Ωcosθ.
|Fcoriolis⊥| = [(2m Ωz vy)2
+ (2m Ωz vx)2]½ = 2m Ωz
v
The magnitude of the horizontal component of the Coriolis force, |Fcoriolis⊥|
= 2m Ωz v, is independent of the direction of
v.
Problem:
If a particle is projected vertically upward from a point on the earth's
surface at northern latitude λ. Find the magnitude and direction of
its deflection due to the Coriolis force when it hits the ground in terms of the
maximum height reached and geff. Here geff is the
acceleration due to gravity already corrected for the centrifugal force, geff =
g + O(Ω2). Neglect terms of order Ω2 and air resistance, and consider only small vertical heights.
Solution:
- Concepts:
Motion in an accelerating frame
- Reasoning:
Assume an observer in the rotating frame at mid latitudes λ = 90o - θ.
The equations of motion in a rotating coordinate system contain fictitious
forces.
mdv/dt = Finertial - mΩ × (Ω ×
r)
- 2mΩ × v.
- Details of the calculation:
mdv/dt = mgeff
- 2mΩ × v.
dvz/dt = -geff , dvy/dt = 2Ωxvz.
vz(t) = v0 - gefft, vy(t) = 2Ωx∫0t(v0
- gefft')dt'
= -2Ω sinθv0t + Ω sinθgefft2.
y(t) = ∫0tvy(t')dt' = -Ω sinθv0t2
+ Ω sinθgefft3/3.
v0 = (2hgeff)½. t = 2(2h/geff)½.
deflection: y(h) = -8Ω sinθ(2h3/geff)½
+ 8Ω sinθ(2h3/geff)½/3.
y(h) = -(8/3)Ω sinθ(2h3/geff)½, or
y(h) = -(8/3)Ω cosλ(2h3/geff)½,
The object is deflected westward.