Newton's laws of motion applied to rigid bodies
Problem:
As shown in the figure, a uniform thin rod of weight W is supported
horizontally by two supports, one at each end. At t = 0, one of these supports
is removed. Find the force on the remaining support immediately thereafter.

Solution:
- Concepts:
Rigid -body motion
- Reasoning:
Immediately after one of the supports is removed, the rod rotates about the
other support. We have acceleration of the CM and angular acceleration
about the CM. The resulting motion keeps the point resting on the other
support fixed.
- Details of the calculation:
Let the X-axis point to the right and the Y-axis point up.
Acceleration of the CM: W - N = -Md2Y/dt2.
Angular acceleration about CM: N(L/2) = -Id2θ/dt2.
I = ML2/12.
To keep the point resting on the other support fixed we need
d2Y/dt2 = (L/2)d2θ/dt2.
Therefore (W - N)/M = N(L2/4)/I = 3N/M. W = 4N.
N = W/4 is the magnitude of the force on the remaining support.
Problem:
A block with mass M hangs from a string that slides over a pulley without
friction. The other end of the string is attached to a massless axel through
the center of a hoop of mass M and radius R that can roll without slipping on a flat
horizontal surface. The system is released from rest. Find the tension in
the string.
Solution:
- Concepts:
Newton's 2nd law,
linear and rotational motion, rolling
- Reasoning:
We use Newton's 2nd law to find the linear acceleration.
The rolling constraint is used to eliminate the frictional force in the
equation.
- Details of the calculation:
For the
hoop: T - f = Ma, fR = Iα = MRa.
For the block: Mg - T = Ma.
Therefore f = Ma, T = 2Ma, Mg = 3Ma, a = g/3, T = (2/3)Mg.
Or, using energy conservation, with the y-axis pointing down:
MgΔy = ½Mv2 + ½Mv2 + ½Iω2 = (3/2)Mv2,
gdy/dt = gv = 3vdv/dt = 3v a.
a = g/3, Mg - T = Ma, T = (2/3)Mg.
Problem:
Three cylinders with the same mass m, the same length h, and the same
external radius R are initially resting on an inclined plane. The coefficient
of sliding friction on the inclined plane, μ, is known and has the same value
for all the cylinders. The first cylinder is an empty tube with inner radius r
and density ρ1, the second is a solid cylinder with density ρ2,
and the third has a cavity exactly like the first one, but closed with two
negligible mass lids and is filled with a liquid with the same density as the
cylinder's walls. The friction between the liquid and the cylinder wall is
considered negligible. The density of the material of the first cylinder is n
times greater than that of the second or of the third cylinder.
(a) Find the condition for angle θ of the inclined plane with the horizontal,
so that none of the cylinders is sliding, i.e. we have pure rolling.
(b) Find the linear acceleration of the cylinders when we have pure rolling.
Compare these accelerations.
(c) Find the reciprocal ratios of the angular accelerations of all three
cylinders if θ is large and the condition for pure rolling is not satisfied.
Compare these angular accelerations.
(d) Find the magnitude of the interaction force between the liquid and the
walls of the third cylinder when this cylinder is sliding, given that the liquid
mass is ml.
Solution:
- Concepts:
Rigid-body motion, linear and rotational motion,
rolling
- Reasoning:
We are asked to compare linear and angular accelerations of three cylinders
when they are rolling and when they are sliding.
(a) For a cylinder rolling freely on an inclined plane the equations of
motion are
mg sinθ - Ff = ma, FfR = Iα,
where α is the angular acceleration. The condition for rolling is a = αR.
Solving the system of equations we find
a = g sinθ/(1 + I/(mR2)), Ff = mg sinθ/(1 + mR2/I).
The condition of non-sliding is Ff < μN, where the normal force
N = mgcosθ.
- Details of the calculation:
(a) Using Ff from above we need mg sinθ < μmg cosθ(1+ mR2/I),
tanθ < μ(1+ mR2/I).
For none of the cylinders to slide, we have to use the largest moment of
inertia I.
The moments of inertia of the three cylinders are
I1 = ½ρ1π(R4 - r4)h, I2
= ½ρ2πR4h, I3 = ½ρ2π(R4
- r4)h.
Because the three cylinders have the same mass we have
m = ρ1π(R2 - r2)h = ρ2πR2h,
which results in
r2 = R2(1 - ρ2/ρ1) = R2(1
- 1/n) with n = ρ1/ρ2.
The moments of inertia can be written as I1 = I2(2
- 1/n), I3 = I2(2 - 1/n)(1/n) = I1/n.
We have ρ1 > ρ2, n > 1, and therefore I1
> I2 > I3.
The necessary condition for none of the cylinders to slide is tanθ < μ(1+ mR2/I1).
(b) The linear accelerations of the rolling cylinders are
a1 = 2g sinθ/[4 - 1/n], a2 = 2g sinθ/3, a3
= 2g sinθ/[2 + 2/n - 1/n2].
a1 < a2 < a3.
(c) If the condition for pure rolling is not satisfied we have Ff
= μN = μmg cosθ and α = (R/I) μmg cosθ
For the cylinders of this problem we have α1 : α2 : α3
= 1/I1 : 1/I2 : 1/I3 = 1 : (2 - 1/n) : n.
1/α1 : 1/α2 : 1/α3
= I1 : I2 : I3 = 1 : 1/(2 - 1/n) : 1/n.
α1 < α2 < α3.
(d) When the cylinders is sliding we have mg sinθ - Ff = ma, Ff
= μmg cosθ, a = g(sinθ - μ cosθ).
Let F be the interaction force between the
liquid and the walls acting on the liquid
mass ml inside the cylinder.
Fx
+ ml gsinθ = mla = mlg(sinθ - μ cosθ),
Fy - mlg cosθ = 0.
Fx = -μ mlgcosθ, Fy = mlg cosθ,
F = (Fx2 + Fy2)½ =
mlg cosθ (1 + μ2)½.
Problem:
A uniform rectangular object of mass m with sides a and b (b > a) and
negligible thickness rotates with constant angular velocity ω about a diagonal
through the center. Ignore gravity.
(a) What are the principal axes and principal moments of inertia?
(b) What is the angular momentum vector in the body coordinate system?
(c) What external torque must be applied to keep the object rotating with
constant angular velocity about the diagonal?
Solution:
- Concepts:
Rigid-body motion, the moment of inertia tensor
- Reasoning:
The body is not rotating about one of its principal axes.
- Details of the calculation:
(a) The principal axes are the symmetry axes. To find the angular momentum
L = I1ω1i + I2ω2j + I3ω3k
we have to find the moments of inertia and the angular velocity components
along the principal axes.
I1 = Ix = ma2/12, I2 = Iy
= mb2/12, I3 = Iz = I1 + I2
= m(a2 + b2)/12.
(b) The component of ω along the principal axes are
ω1 = ωb/(a2 + b2)½, ω2
= ωa/(a2 + b2)½, ω3 = 0. ω =
[ω/(a2 + b2)½] (b, a, 0).
L = I1ω1i + I2ω2j + I3ω3k
= [mabω/(12(a2 + b2)½)] (a, b, 0).
(Note: i, j,
k refer to the body-fixed axes.)
(c) Let dL/dt be the rate of change of
L with respect to the space fixed
axes, d'L/dt its rate of change with respect to the body fixed axes.
dL/dt = d'L/dt +
ω ×
L = τ. In the body-fixed coordinate system
ω is
constant, d'L/dt = 0.
τ = ω ×
L = (ω1L2 - ω2L1)k =
[mabω2/(12(a2 + b2))](b2 - a2)k.
(Note: k points along the body-fixed z-axis)
Problem:
Near the surface of the earth a uniform disk of mass M1
and radius R is pivoted on a frictionless horizontal axle through its center. A
small mass M2 is attached to the disk at radius R/2, at the
same height as the axle. This system is released from rest.
(a) What is the angular acceleration of the disk immediately after
it is released?
(b) What will be the magnitude of the maximum angular velocity that the disk
will reach?
Solution:
- Concepts:
The moment of inertia, Newton's 2nd law applied to
rotational motion, energy conservation
- Reasoning:
The system is constrained to rotate about a fixed axis, gravity is
responsible for a torque about this axis, the force of gravity is a
conservative force.
- Details of the calculation:
(a) The moment of inertia of the disk about its center is Idisk
= ½M1R2.
The total moment of inertia of the system about the center of the disk is
I = Idisk + M2(R/2)2
= (2M1 + M2)R2/4.
When the system is released the torque is τ = Iα = M2gR/2.
The angular acceleration α when the system is released therefore is
α = M2gR/2I, = 2M2g/[(2M1
+ M2)R].
(b) Energy conservation: ½Iωmax2
= M2gR/2.
ωmax2 = M2g
R/I = 4M2g/[(2M1 + M2)R].
Problem:
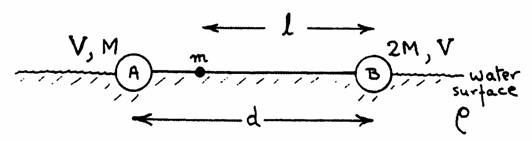
A dumbbell consists of two spheres A and B, each with volume V, which are
connected by a rigid rod. A has mass M and B has mass 2M. The
distance between the centers of the spheres is d as shown below. In all
parts of this problem assume that the mass and volume of the rod and the moment
of inertia of each sphere about its diameter are so small that they can be taken
to be zero, and that air resistance can be neglected.

- (a) True or false?
If the dumbbell is dropped in a vacuum with the
rod initially horizontal, the heavier sphere B will hit the floor first.
- (b) True or false?
If the dumbbell is thrown on a frictionless
horizontal surface with the rod horizontal, sphere B will move in a straight
line with A rotating about it.
- (c) What is the moment of inertia of the dumbbell about an axis, which
passes through the center of mass of the dumbbell and is perpendicular to
the rod?
- (d) The dumbbell is placed on a frictionless horizontal table. Sphere
A is attached to a frictionless pivot so that B can be made to rotate about
A with constant angular velocity.
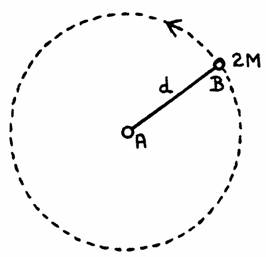
If B makes one revolution in period T, what is the tension in the rod?
- (e) Sphere A is now attached to a frictionless pivot so that B hangs
freely vertically. At some instant of time a strong wind begins to apply a
constant horizontal force to B. As a result, the dumbbell rotates about A
in a vertical plane.
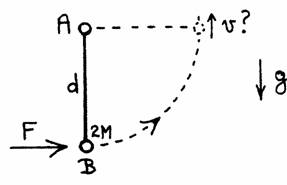
What is the speed of B (in terms of F, d, g, and M) at the instant when the
dumbbell is horizontal?
- (f) The dumbbell is placed in water, which has density ρ. It is
observed that by attaching a mass m to the rod, a distance l from the center
of B, the dumbbell floats with the rod horizontal on the surface of the
water and each sphere exactly half submerged, as shown below. The volume of
the mass m is negligible. In terms of V, M, d, and ρ, derive the value of m
and the value of l.
Solution:
- Concepts:
Various concepts and definitions introduced in a general
physics course, such as Newton's second law, torque, buoyant force, moment
of inertia, etc.
- Reasoning
The different parts of the problem test the student's
understanding of some of the fundamental concepts introduced in a typical
general physics course.
- Details of the calculation:
(a) False: The only force acting on the
dumbbell is gravity, giving mass-independent acceleration g.
(b) False:
The CM will move in a straight line. Both spheres may rotate about the CM
with angular frequency ω0, if ω0 ≠ 0.
(c) Location
of the CM: MR = 2M(d - R), R = distance of CM from sphere A,
R = (2/3)d.
Moment of inertia: I = M(2d/3)2 + 2M(d/3)2 = (2/3)Md2.
(d) The tension must provide the centripetal force, Fc = 2Mv2/d.
v = 2πd/T, Fc = 8Mπ2d/T2.
(e) The
tangential component of the applied horizontal force is Ft =
Fcosθ.
The tangential component of the gravitational force is 2Mgsinθ.
The magnitude of the torque pointing out of the page is
τ = Fdcosθ -
2Mgdsinθ = Iα. (I = moment of inertia, I = 2Md2, α = angular
acceleration.)
½Iω2 = ∫τdθ.
ω2 = 2(Fd - 2Mgd)/I
= (Fd - 2Mgd)/(Md2).
But ω2 = v2/d2.
v = [(Fd - 2Mgd)/M]1/2.
We can a also use the work-kinetic
energy theorem.
Total work done by external forces: W = Fd - 2Mgd = ½2Mv2.
(f) The system is at rest, the total force and the total torque are zero.
No force: ½ρVg + ½ρVg - Mg - 2Mg - mg = 0, m = ρV - 3M.
(buoyant force +
gravitational force = 0)
No torque about sphere B: (½ρVg - Mg )d - mgl =
0.
l = (½ρVd - Md)/(ρV - 3M) = (m + M)d/(2m).
Problem:
 Suppose a uniform wheel of radius R, thickness d, and
mass M is rotating with uniform angular speed ω about an
axis that passes through its center of mass but makes an angle
θ
with a line perpendicular to the wheel. Find the angular momentum of the wheel and the
torque about the principal axes.
Suppose a uniform wheel of radius R, thickness d, and
mass M is rotating with uniform angular speed ω about an
axis that passes through its center of mass but makes an angle
θ
with a line perpendicular to the wheel. Find the angular momentum of the wheel and the
torque about the principal axes.
Solution:
- Concepts:
Rigid body motion, Euler's equations
- Reasoning:
Euler's equations give us the relationships between torque, angular
acceleration and angular velocity about the principal axes.
- Details of the calculation:
Orient the body-fixed
coordinate system so that the z-axis is perpendicular to the wheel, and
ω lies in the xz-plane. Then ωx
= ωsinθ, ωy
= 0, ωz = ωcosθ.
Euler's equations are
Ixdωx/dt + (Iz - Iy)ωyωz
= τx, Iydωy/dt + (Ix
- Iz)ωzωx
= τy, Izdωz/dt + (Iy
- Ix)ωxωy
= τz.
dωx/dt = dωy/dt
= dωz/dt = 0. ωy = 0.
τx
= τz = 0.
(Ix
- Iz)ωzωx
= τy, (Ix
- Iz)ω2sinθcosθ
= τy, (Ix
- Iz)ω2(sin2θ)/2 j
= τ = torque about the y-axis.
For a cylinder of radius R, height d, and mass M we have
Iz = M/(πr2d)∫-d/2d/2dz∫0R2πr3dr
= MR2/2,
Ix = M/(πr2d)∫-d/2d/2dz∫02πdθ∫0Rrdr(r2sin2θ
+ z2) = Md2/12 + MR2/4 = Iy.
τ = (Md2/12 - MR2/4)ω2(sin2θ)/2
j.
L = i Ixωsinθ
+ k Izωcosθ.
Here i and k refer to the body fixed axis.
L = i (Md2/12 + MR2/4)ωsinθ
+ k (MR2/2)ωcosθ.
Problem:
 A pair of long, thin, rods, each of length L and mass M, are connected to a hoop
of mass M and radius L/2 to form a 4-spoked wheel as shown.
A pair of long, thin, rods, each of length L and mass M, are connected to a hoop
of mass M and radius L/2 to form a 4-spoked wheel as shown.
Express all answers in terms of the given variables and fundamental constants.
(a) Calculate the moment of inertia for the entire spoked-wheel assembly for an
axis of rotation through the center of the assembly and perpendicular to the
plane of the wheel.
The wheel is now mounted to a frictionless fixed axle and suspended from a
vertical support. Several turns of light cord are wrapped around the wheel, and
a mass M is attached to the end of the cord and allowed to hang. The mass is
released from rest.
(b) Determine the tension in the cord supporting the mass as it accelerates
downwards.
(c) Calculate
the angular acceleration of the wheel as the mass descends.
(d) Determine the instantaneous velocity of the mass after the wheel has turned
one revolution.
(e) Determine the instantaneous angular momentum of the mass-wheel system about
the center of the wheel after the wheel has turned one revolution.
Solution:
- Concepts:
Newton's second law, linear and rotational motion
- Reasoning:
We use Newton's 2nd law to find the tension.
- Details of the calculation:
(a) The moment of inertia for the spoked wheel is the sum of the individual
moments of inertia of its three components, Iwheel = 2Irod
+ Ihoop.
Iwheel = 2ML2/12 + MR2 = 2ML2/12 +
M(L/2)2 = 5ML2/12.
(b) For the hanging mass: Fnet = Mg - T = Ma.
For the wheel: τ = (L/2)T = Iα = (5ML2/12)(2a/L).
a = 3T/(5M), T = 5Mg/8.
(c) a = 3T/(5M) = 3g/8, α = 2a/L = (3/4)g/L.
(d) vf2 = vi2 + 2aΔy. Here vf2
= 2(3g/8))(2πL/2) = 3gπL/4, vf = (3gπL/4)½.
(e) Lsystem = Lmass + Lwheel = M(L/2)vf
+ Iwheel 2vf/L = ML (4gπL/3)½.