Standard Lagrangian problems
(other problems)
One generalized coordinate
Problem:
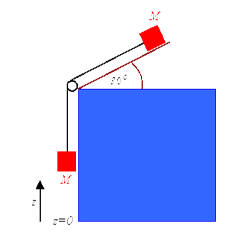
Consider the system shown below, in which two bodies of the same mass M are
connected by a massless string across a massless frictionless pulley. The
coefficient of friction for the mass on the incline is μ and the angle of
the incline is 30o with respect to the horizontal. Define the
z-coordinate as shown. Assume downward motion and μ <
1.
(a) Determine the Lagrangian L(z, dz/dt) for the system.
(b) If at t = 0, z = z0, and v = v0, find z(t) until the
block is stopped by the pulley.
Solution:
- Concepts:
Lagrange's equations,
d/dt(∂L/∂(dq/dt)) -
∂L/∂q = Qj.
where L contains the potential of the conservative forces and Qj
represents the generalized forces not arising from a potential.
- Reasoning:
In this problem conservative and non-conservative forces (gravity and
friction) are present.
- Details of the
calculation:
(a) We only need one generalized coordinate.
Assume downward motion. Then
T = M(dz/dt)2, U = Mgz + Mgzsin(30o) + constant = 1.5
Mgz + constant. L = T - U.
Qz = μMgcos(30o).
(b) Lagrange's equation yields 2Md2z/dt2 + 1.5Mg = μMgcos(30o).
d2z/dt2 = (μcos(30o) - 1.5)g/2 = g'.
Since μ < 1, g' is negative.
dz/dt = -v0 - |g'|t, z(t) = z0 - v0t -
½|g'|t2, until the block is stopped by the pulley.
Problem:
A flexible uniform string of mass M and length L slides smoothly over a
circular, frictionless peg of radius R, with the right-hand end moving downward
in a uniform gravitational field with g = 9.8 m/s2. The string is
released from rest in a situation where the right-hand end hangs below the
left-hand end by an amount d.
(a) Find an expression for Z, the vertical position of the right-hand end as
a function of time during the interval when the string is still in contact with
the peg over the full upper half of the peg. Assume that the position Z of the
right-hand end is measured downward from the equilibrium position Z = 0.
(b) In the limit R --> 0, find Z also for times
subsequent to the loss of contact with the peg.
Solution:
- Concepts:
Newton's second law or Lagrange's equations.
- Reasoning:
For a conservative system we find and solve the equations of motion.
- Details of the calculation:
(a) F(z') = (M/L)g2z'. U = -∫0z
F(z')dz'.
T = ½M(dz/dt)2, U = -Mgz2/L
L = T - U, d2z/dt2 = 2gz/L
z(t) = Bexp(At) + B'exp(-At) is the general solution.
A = (2g/L)½, B an B' are determined by the initial conditions.
z(0) = B + B' = d/2, dz/dt|0 = A(B - B') = 0, B = B' = d/4.
z(t) = (d/2)cosh(At) = (d/2)cosh((2g/L)½t),
(b) When R => 0 the result from (a) is valid for z < L/2.
For z > L/2 we
have a freely falling object, falling from an initial position z = L/2 with
initial velocity vc = v(L/2).
From energy conservation we have ½M(dz/dt)2 - Mgz2/L
= -Mgd2/4L.
Evaluating at z = L/2 we find
vc = v(L/2) = [g(L2-d2)/2L]½
= [(gL - d2/L)/2]½
at
tc = t(L/2) = (L/(2g))½cosh-1(L/d).
z(t) = (L/2) + vc(t - tc) + ½g(t - tc)2.
Problem:
For the Atwood Machine shown, all pulleys are smooth and non-rotating and all
cords are inextensible. Work out the accelerations of 3m and 5m.
Solution:
- Concepts:
Lagrange's Equations
- Reasoning:
All forces except the forces of constraint are derivable from a potential.
The Lagrangian formalism is well suited for such a system.
- Details of the calculation:
Let the y-axis point downward. Let l1 be the hanging portion
(not the part in contact with the pulley) of the length of the red string, l2 the hanging portion of the
length of the blue string, and l3 the hanging portion of the length
of the green string. Let us find the kinetic and potential energy of the
masses in terms of the generalized coordinates q1, q2,
and q3. We can then write down the Lagrangian and the
equations of motion, which will yield the accelerations of the masses.
| mass |
y-coordinate |
vecocity
|
T
|
U |
| 2m |
l1-q1 |
-dq1/dt |
m(dq1/dt)2 |
-2mg[l1-q1] |
| m |
l1-q1+q2 |
-dq1/dt+dq2/dt |
(m/2)[(dq1/dt)2+(dq2/dt)2-2(dq1/dt)(dq2/dt)] |
-mg[l1-q1+q2] |
| 3m |
l1-q1+l2-q2 |
-dq1/dt-dq2/dt |
(3m/2)[(dq1/dt)2+(dq2/dt)2+2(dq1/dt)(dq2/dt)] |
-3mg[l1-q1+l2-q2] |
| 5m |
q1 |
dq1/dt |
(5/2)m(dq1/dt)2 |
-5mg[q1] |
| 4m |
q1+l3-q3 |
dq1/dt-dq3/dt |
2m[(dq1/dt)2+(dq3/dt)2-2(dq1/dt)(dq3/dt)] |
-4mg[q1+l3-q3] |
| 6m |
q1+q3 |
dq1/dt+dq3/dt |
3m[(dq1/dt)2+(dq3/dt)2+2(dq1/dt)(dq3/dt)] |
-6mg[q1+q3] |
T = (21m/2)(dq1/dt)2+2m(dq2/dt)2+5m(dq3/dt)2+2m(dq1/dt)(dq2/dt)+2m(dq1/dt)(dq3/dt).
U = -mg(9q1-2q2+2q3+constant).
L = T - U.
d/dt(∂L/∂(dq/dt)) -
∂L/∂q = 0.
Using q1 we find: 21d2q1/dt2
+ 2d2q2/dt2 + 2d2q3/dt2
- 9g = 0.
Using q2 we find: 4d2q2/dt2
+ 2d2q1/dt2 + 2g = 0.
Using q3 we find: 10d2q3/dt2
+ 2d2q1/dt2 - 2g = 0.
Solving the 3 equations for the 3 unknowns d2q1/dt2,
d2q2/dt2, and d2q3/dt2
we
find
d2q1/dt2 = 24g/49, d2q2/dt2
= -73g/49, d2q3/dt2 = 5g/49.
Therefore
a(3m) = -d2q1/dt2-d2q2/dt2
= -29g/49,
a(5m) = d2q1/dt2 = 24g/49.
Problem:
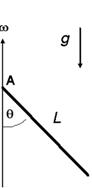
A thin uniform rod of length L and rotates with a constant
angular velocity ω around a fixed point
A. (See figure!) Find the angle of inclination
θ.
Solution:
- Concepts:
Lagrangian Mechanics or Motion in a non-inertial frame
- Reasoning:
In the inertial frame we have motion with constraints. In the
rotating frame the rod is at rest.
- Details of the
calculation:
Lagrangian Mechanics:
T = ½(mL2/3)(dθ/dt)2
+ ½∫0Lρdl
(l sinθ ω)2, U = -(mgL/2)cosθ
T = ½(mL2/3)(dθ/dt)2
+ ½ mL2 sin2θ ω2/3, U = -(mgL/2)cosθ
Lagrange's equation: (mL2/3)d2θ/dt2
+ (mL2 sinθ cosθ/3)ω2 - (mgL/2)sinθ = 0.
For d2θ/dt2
= 0 we need cosθ = 3g/(2Lω2).
Motion in a non-inertial frame:
In a frame rotating with angular frequency
ω the total torque is zero.
The torque is produce by the gravitational force and by the fictitious
centrifugal force ρdl lsinθ ω2 acting on each
element of the rod with mass dm = ρdl.
Total torque about point A:
τ = -mg(L/2)sinθ
+ ∫0Lρdl
(ω2lsinθ)
lcosθ.
τ = 0 -->
(mgL/2)sinθ = ∫0Lρdl
l2 ω2 sinθ cosθ = mL2 sinθ cosθ ω2/3.
cosθ = 3g/(2Lω2),
θ
= cos-1(3g/(2Lω2)).
Problem:
A particle of mass m is attached (so it cannot slide)
to the midpoint of a weightless rod of length l.
The ends of the rod are constrained to move along
the x and y axes. A uniform gravitational field acts
in the negative y-direction. Use θ as a generalized coordinate.
Neglect friction.
(a) Write the Lagrangian and obtain the equation of motion.
(b) Solve the equation of motion for small θ, i.e. |θ| << 1,
assuming that, at t = 0, θ = θ0 and dθ/dt = 0.
Solution:
- Concepts:
Lagrange's Equations
- Reasoning:
All forces except the forces of constraint are derivable from a potential. The
Lagrangian formalism is well suited for such a system. We are asked to write
down and solve Lagrange's equation of motion.
- Details of the calculation:
(a) As long as the rod remains in contact with the wall, we have the
constraints
x = (l/2)sinθ and y = (l/2)cosθ for the coordinates of m.
The Lagrangian L is given by L = T - U.
T = ½m ((dx/dt)2 + (dy/dt)2), U = mg(l/2)cosθ.
dx/dt = (l/2)cosθ dθ/dt, dy/dt = -(l/2)sinθ dθ/dt, T = (1/8)ml2(dθ/dt)2.
L = (1/8)ml2(dθ/dt)2 - mg(l/2)cosθ.
We need only one generalized coordinate and one generalized velocity.
d/dt(∂L/∂(dq/dt)) -
∂L/∂q = 0.
Lagrange's equation yields ¼ml2d2θ/dt2
= (mglsinθ)/2.
(b) Let θ << 1, then sinθ ≈ θ and d2θ/dt2
≈ (2g/l)θ.
The general solution to this differential equation is
θ = A exp((2g/l)½t) + B exp((2g/l)½t).
The initial conditions are θ(0) = θ0, dθ/dt|t=0 = 0.
Therefore A + B = θ0, A - B = 0, A = B = θ0/2.
θ = (θ0/2) exp((2g/l)½t) + (θ0/2)
exp((2g/l)½t) = θ0 cosh((2g/l)½t).
This solution is only valid as long as θ is still small.
Problem:
A particle of mass m moves in one dimension acted upon by
the force
F(x) = -kx + a/x3
where k and a are both positive constants.
(a) Sketch the potential energy.
(b) Sketch the velocity phase space portrait for this system.
(c) Calculate the locations of the equilibrium points of the motion.
(d) Indicate whether each of these points is stable or unstable.
(e) Find the Hamiltonian.
Solution:
- Concepts:
Phase space portraits, Lagrangian mechanics
- Reasoning:
We are asked to sketch the phase space portrait and write down the
Hamiltonian.
- Details of the
calculation:
(a) F(x) = -dU(x)/dx. U(x) = ½ kx2 +
a/(2x2).
The sketch shows U(x) for a = k = 1.
(b) Velocity phase
portrait:
F(x) = 0 at x = ±(a/k)¼,
where U(x) = Umin = ½(ka)½ + ½(ak)½ =
(ak)½.
For the system we have E ≥ (ak)½.
Energy conservation: E = ½mv(x)2 + U(x). v(x) =
±(2(E - U(x))/m )½.
(c) The equilibrium points are
x = ±(a/k)¼.
The potential energy goes to infinity at x = 0 and that point cannot be reached
for any motion.
(d) Both points are stable.
(e) H = p2/(2m) + ½ kx2 + a/(2x2).
Multiple generalized coordinates
Problem:
(a) Give the definition of a cyclic variable.
(b) How is it related to conservation laws and physical symmetry?
(c) Give two examples of systems described by Lagrangians with cyclic variables
and relate them to part b.
Solution:
- Concepts:
The Lagrangian, the Hamiltonian, conservation laws, cyclic variables
- Reasoning:
The problem asks for the definition of a cyclic variable and its relationship
to conservation laws.
- Details of the calculation:
(a) The Lagrangian is a function of the generalized coordinates and
velocities and time. Any generalized coordinate, which does not appear
explicitly in the Lagrangian, is said to be cyclic.
∂L/∂qi = 0 implies qi = cyclic.
(b) The corresponding generalized momentum pi =
∂L/∂(dqi/dt)
is a constant of motion, it is conserved. A coordinate which is cyclic in the Lagrangian is also cyclic in
the Hamiltonian. The connection between the symmetry properties of the
physical system and constants of motion can be derived in terms of the
Hamiltonian.
Example: H is symmetric about an axis. H is invariant under
rotation about this axis, it does not depend on the angle of rotation about
this axis. The angle is a cyclic coordinate, the corresponding angular
momentum is conserved.
(i) A particle in a central potential:
L = ½m((dr/dt)2 + r2(dФ/dt)2) - U(r).
LФ =
mr2 dФ/dt
is constant.
(ii) A particle subject to a constant force
F = F0k:
L = ½m((dx/dt)2 + (dy/dt)2 + (dy/dt)2) + Fz.
x and y are cyclic, px = m dx/dt and
py = m dy/dt are constants of motion.
Problem:
Consider the 2D problem of a free particle of mass m moving in the xy plane.
(a) Use the Lagrangian formalism to find the equations of motion of the
particle in
polar coordinates (r, θ).
(b) Find the general solution for the orbit r(t).
Hint: Use energy conservation!
(c) At t = 0, let r = b, θ = 0, dr/dt = 0, dθ /dt = ω0. Find r(t)
and θ(t).
Solution:
- Concepts:
Lagrangian mechanics
- Reasoning:
We are instructed to use the Lagrangian formalism to find the equations of motion of
a free particle in
polar coordinates (r, θ).
- Details of the calculation:
(a) Let vr = dr/dt, ω = dθ/dt.
x = r cosθ, y = r sinθ, vx = -r sinθ ω + vrcosθ, vy
= r cosθ ω + vr sinθ
vx2 + vy2 = vr2
+ r2 ω2.
L = T = ½m(vx2 + vy2) = ½m(vr2
+ r2 ω2)
d/dt(∂L/∂vr) - ∂L/∂r = 0, d/dt(∂L/∂ω) - ∂L/∂θ = 0.
Equation of motion for θ:
m r2 dθ/dt = M = constant. Angular momentum is conserved.
Equation of motion for r:
md2r/dt2 = m r ω2.
d2r/dt2 = M2/(m2r3).
(b) E = ½m(vr2 + r2 ω2) = ½mvr2
+ M2/(2mr2)
dr/dt = ((2/m)(E - M2/(2mr2))½.
∫dr/((2/m)(E - M2/(2mr2))½ = ∫dt
t - t0 = (m/2)∫dr2/(2mEr2 - M2)½
= [(m/2E)(r2 - M2/(2mE))]½.
r = [2E(t - t0)2/m + M2/(2mE))]½.
(c) M = mb2ω0, E = ½ mb2ω02,
r2 = b2(ω02(t - t0)2
+ 1) , r2(t = 0) = b2 --> t0 = 0.
r(t) = b(ω02t2 + 1)½,
dθ(t)/dt = b2ω0t/[
b2(ω02t2 + 1)], θ(t)
= tan-1(ω0t) or θ(t)
x = r cosθ = r/secθ = r/(tan2θ + 1)½ =
r/(ω02t2 + 1)½ = b.
y = r sinθ = r/cosecθ = r/(cot2θ + 1)½ =
r/(1/ω02t2 + 1)½ = bω0t
= vt.