Review Problems
Problem 1:
A particle of mass M and relativistic momentum p decays in flight into
two particles of mass m. Both particles of mass m move with momentum p'
making an angle θ with respect to the direction of p. Find M in terms of
m, p', and θ.
Solution:
- Concepts:
Relativistic collisions, energy and momentum
conservation
- Reasoning:
The decay of a particle is a relativistic problem. In relativistic
"collisions" energy and momentum are always conserved.
- Details of the calculation:
Energy conservation: M2c4 + p2c2
= 4(m2c4 + p'2c2).
Momentum conservation: p = 2p'cosθ.
Algebra: M2c4 + 4p'2c2cos2θ
= 4m2c4 + 4p'2c2.
M2c4 = 4m2c4 + 4p'2c2
- 4p'2c2cos2θ = 4m2c4 +
4p'2c2(1 - cos2θ).
M2 = 4m2 + (4p'/c2)(1 - cos2θ). M =
2(m2 + (p'/c2)sin2θ)½.
Problem 2:
In his acceptance speech for the Royal Society's Copley Medal on November 30,
2006 Professor Stephen Hawking said that humans must colonize other planets in
other solar system, or otherwise face extinction by one disaster or another.
However, using conventional, chemical-fuel rockets and leaving the solar system
with a speed of about 25
km/s, it would take 50000 years to get to the nearest star. But by
using matter/antimatter annihilation, speeds close to the speed of light
could be reached, making it possible to get to the nearest star in about 6
years.
(a) How fast would that spacecraft have to travel?
(b) How long would the one way trip appear to the passengers?
Solution:
- Concepts:
The proper time interval
- Reasoning:
We are asked calculate the proper time interval in the spacecraft frame,
given the time interval in the earth fame.
- Details of the calculation:
(a) Assumed distance to nearest star:
vt = (25000 m/s)*(50000 y)*(365 day/y)*(24
h/day)*(3600 s/h)
= 3.94*1016 m = 4.16 ly.
To travel this distance in 6 years the speed of the spacecraft would have to be
v = (25000 m/s)*(50000 y)/(6 y) = 0.694 c.
(b) Proper time τ = t/γ = (6y)*(1 - 0.6942)½ =
4.32
y.
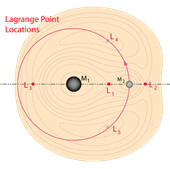
Problem 3:
The Lagrange points are points of equilibrium for small-mass objects under the
gravitational influence of two massive orbiting bodies. There are five special
points where an object placed at any one of these points will be at rest in the
rotating reference frame.
Assume M2
orbits M1 in a circular orbit of radius R, in the rest frame of M1.
Let M1 = M and M2 = M/10. Find the approximate location
of the Lagrange point L1 and L2 using M2 << M1.
(Make reasonable approximations.)
Solution:
- Concepts:
Two interacting masses, motion in a central potential, non-inertial frames
- Reasoning:
M1
and M2 orbit their CM. The problem of two interacting particles in their CM frame is
equivalent to the problem of a fictitious particle of reduced mass μ moving in a central potential with potential energy U(r).
Here μ = M1M2/(M1 + M2) = M/11.
- Details of the calculation:
U = GM2/(10R). F = GM2/(10R2) = (M/11)v2/R
= (M/11)ω2R.
ω2
= 11GM/(10R3).
The CM frame is rotating with angular frequency ω.
For a small
mass m to be at rest at L1 in the rotating CM frame a distance r from
M2 we need the vector sum of the gravitational forces and the
fictitious centrifugal force to be zero.
-GMm/(R - r)2 + mω2(R - r) + GMm/(10r2) = 0.
1/(R - r)2 - 11(R
- r)/(10R3) - 1/(10r2) = 0.
Now we have to make
reasonable approximations.
Using M1 >> M2 we set 11/10 ≈ 1. We also assume R >> r. Then
(1 + 2r/R)/R2
- 1/(10r2) ≈
(R - r)/R3.
(1 + 2r/R)/R2 -
1/(10r2) ≈
1/R2.
2r/R3 ≈
1/(10r2).
r ≈ R/2.714 ≈ 0.368 R
For a small
mass m to be at rest at L2 in the rotating CM frame a distance r from
M2 we need
-GMm/(R +
r)2 + mω2(R + r) - GMm/(10r2) = 0.
1/(R + r)2 - (11/10)(R + r)/r3 + 1/(10r2)
= 0.
(1 - 2r/R)/R2 +
1/(10r2) ≈
1/R2.
Problem 4:
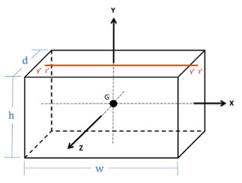
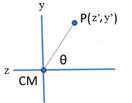
Assume a rectangular
box of mass M and uniform density is suspended from a rod intersecting two of
its faces as shown in the figure in a uniform gravitational field. The
intersection points have coordinates (±w/2, y', z'). The gravitational
acceleration is -g j. The box can rotate without friction about the
rod. What is the frequency of small oscillation of the box about its
equilibrium position?
Solution:
- Concepts:
Small displacements from stable equilibrium
- Reasoning:
The potential energy has a minimum at the position of stable equilibrium.
- Details of the calculation:
(a) Potential energy: U = -Mgd'cosθ = -Mg(y'2 + z'2)½cosθ.
Extreme U: dU/dθ = 0, sinθ =
0, θ = 0 or π.
θ = π, CM
lies directly above the pivot point --> unstable equilibrium.
θ = 0, CM lies directly below the
pivot point --> stable equilibrium.
For small angles θ near θ =
0 we have U(θ) = U(0) + dU/dθ|0θ
+ ½ d2U/dθ2|0θ2 +
... .
d2U/dθ2 = Mgd'cosθ.
U(θ) = U(0) + ½Mgd'θ2,
keeping only terms up to second order in θ.
U(θ) = U(0) + ½kθ2
with k = Mgd'.
τ = I d2θ/dt2 = -dU/dθ =
-Mgd'θ. We have a restoring
torque.
To find I we use the parallel axis theorem.
Ixx(CM) =
(M/12)(h2 + d2). I(y',z') = IxxCM + M(y'2
+ z'2) = M(h2/12 + d2/12 + y'2 + z'2).
d2θ/dt2 = -g(y'2 + z2)½(h2/12
+ d2/12 + x2 + y2)θ.
Frequency of oscillations: ω2
= g(y'2 + z'2)½(h2/12 + h2/12
+ y'2 + z'2).
Problem 5:
A particle of mass m moves in one dimension. It is
remarked that the exact eigenfunction for the ground state is Ψ(x) = A/cosh(λx), where λ is a constant and A is the normalization constant. Assuming that
the potential U(x) energy vanishes at infinity, derive the ground state energy
and also U(x).
Solution:
- Concepts:
The time-independent Schroedinger equation
- Reasoning:
If
ψ(x) and E are given, we can solve for U(x).
- Details of the calculation:
The given wave function is a solution of the 1-dimensional,
time-independent Schroedinger equation.
(-ħ2/2m)(∂2/∂x2)Ψ(x) + U(x)Ψ(x) = EΨ(x).
(∂/∂x)(1/cosh(λx)) = -(sinh(λx)/cosh2(λx))λ.
(∂2/∂x2)(1/cosh(λx)) = -(λ2/cosh(λx))[1 - 2sinh2(λx)/cosh2(λx)].
(ħ2/2m)Aλ2/cosh(λx))[1 - 2sinh2(λx)/cosh2(λx)]
+ U(x)A/cosh(λx) = EA/cosh(λx).
(ħ2λ2/2m)[1 - 2sinh2(λx)/cosh2(λx)]
= E - U(x).
As x --> ∞, U(x) --> 0, and sinh(λx)/cosh(λx) --> 1. Therefore E = -(ħ2λ2/2m).
U(x) = -(ħ2λ2/m) + (ħ2λ2/m) sinh2(λx)/cosh2(λx)]
= -(ħ2λ2/m)(1/cosh2(λx)]).