Lagrangian problems, constrained point masses
Problem:
A circular hoop of radius r rotates with angular frequency ω about a vertical
axis through the center of the hoop in the plane of the hoop. A bead of mass m
slides without friction around the hoop and is subject to gravity.
(a) Give the Lagrangian in terms of the angle θ shown in the drawing.
(b) Find the equation of motion in terms of this angle.
(c) Find the values of θ for which the bead may be stationary with respect to
the hoop and determine which of the stationary points are stable.
Solution:
- Concepts:
Lagrange's equations
- Reasoning:
Lagrange's equations are the equations of motion.
- Details of the calculation:
(a) L = T - U.
T = ½m(r2(dθ/dt)2 + r2sin2θ ω2),
U = -mgr cosθ.
L = ½m(r2(dθ/dt)2 + r2sin2θ ω2)
+ mgr cosθ.
Here r and ω are constants.
(b)
d/dt(∂L/∂(dqi/dt)) -
∂L/∂qi = 0.
∂L/∂(dθ/dt) = mr2(dθ/dt), ∂L/∂θ = mr2sinθ cosθ ω2
- mgr sinθ.
mr2d2θ/dt2 - mr2sinθ cosθ ω2
+ mgr sinθ = 0.
d2θ/dt2 = sinθ cosθ ω2 - (g/r) sinθ.
(c) d2θ/dt2|θequ = 0 for a stationary
point.
The angles θ = 0, θ = π, or cosθ = g/(rω2) define stationary
points.
We need g/(rω2) < 1 for the point θ = cos-1(g/(rω2)
to exist.
For a stable point we need a restoring force. Let θ = θequ + δ.
We need d2δ/dt2 = -cδ, with c a positive number.
d2δ/dt2 = sin(θequ + δ)cos(θequ
+ δ) ω2 - (g/r) sin(θequ + δ)
= d(sinθ cosθ ω2 - (g/r) sinθ)/dθ|θequ*δ (Taylor
series expansion)
= (cos2θqequ ω2 - sin2θθequ
ω2 - (g/r) cosθθequ)δ.
For a stable point we need cos2θθequ ω2 -
sin2θθequ ω2 - (g/r) cosθθequ to
be negative.
Check:
For the stationary point θθequ = 0:
cos2θθequ ω2 - sin2θθequ
ω2 - (g/r)cos θθequ = ω2 - (g/r).
If g/r > ω2 then this point is stable, otherwise it is unstable.
For the stationary point θθequ = π:
cos2θθequ ω2 - sin2θθequ
ω2 - (g/r)cosθθequ = ω2 + (g/r).
This point is always unstable.
For the stationary point θθequ = cos-1(g/(rω2)):
cos2θθequ ω2 - sin2θθequ
ω2 - (g/r)cosθθequ = g2/(r2ω2)
- ω2 < 0 since g/(rω2) < 1 for the point to exist.
This point is always stable if it exists.
Similar problems
Problem:
In the figure above the mass point m rotates about the point s. At the same
time the thread holding the mass point is shortened continuously. Find the
constants of motion.
Solution:
- Concepts:
Lagrange's Equations
- Reasoning:
All forces except the forces of constraint are derivable from a potential.
To find the constants of motion we find the Lagrangian and look for cyclic
coordinates.
- Details of the calculation:
Let x and y be the Cartesian coordinates in the plane of the circle and r
and Ф be the polar coordinates.
r = R0 - ct is equation of constraint.
The constraint is holonomic and time dependent.
x = (R0 - ct)cosФ, y = (R0 - ct)sinФ.
T = ½m(vx2 + vy2) = ½m((dФ/dt)2(R0
- ct)2 + c2).
L = T, we have only one generalized coordinate, Ф.
∂L/∂Ф = 0, Ф is cyclic.
∂L/∂(dФ/dt) = m(dФ/dt)(R0
- ct)2 = constant, since (d/dt)(∂L/∂(dФ/dt)) = 0.
The angular momentum about the vertical axis is conserved.
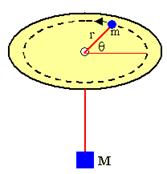
Problem:
An object of mass m slides on a horizontal, friction-free
horizontal table. A light, inextensible string, which passes through a small
hole in the table, attaches the mass to a second body of mass M. The second
body hangs below the table where g = -9.8 m/s2 (see the sketch). At
time t = 0, mass m is located at position (r,
θ).
(a) Determine the differential equations governing the
motion of the system.
(b) For the special case that r = constant, solve the resulting equations and
interpret your results.
(c) What are the constants of motion for this system?
Solution:
- Concepts:
Lagrange's equations
- Reasoning:
All forces except the forces of constraint are derivable from a potential.
To find the constants of motion we find the Lagrangian and look for cyclic
coordinates. If the generalized coordinates and momenta we choose do not
depend on time and the Lagrangian does not depend explicitly on time, then
the energy is a constant of motion.
- Details of the calculation:
(a)
T = ½mr2(dθ/dt)2
+ ½(M + m)(dr/dt)2,
U = Mgr + U0. U0 is an arbitrary constant.
L = T - U, ∂L/∂θ
= 0, the coordinate θ cyclic,
∂L/∂(dθ/dt) =
is a constant of motion.
∂L/∂(dθ/dt) =
mr2(dθ/dt) = C.
Energy conservation leads to ½(M + m)(dr/dt)2
+ C2/(2mr2) + Mgr + U0 = E.
The first-order differential equations governing the motion of the system
are
½(M + m)(dr/dt)2 + C2/(2mr2)
- Mg(L - r) = E, mr2dθ/dt
= C.
The second-order differential equations governing the motion of the
system are
∂(mr2(dθ/dt))/∂t
= 0, (M + m)d2r/dt2 - C2/(mr3)
+ Mg = 0.
(b) r = constant = r0, dr/dt = 0.
dθ/dt
= ω
= C/mr02, the angular velocity is constant.
E = ½m(r0ω)2
+ Mgr0 + U0 = ½m(r0ω)2
= ½mv2, if we choose U0 = -Mgr0.
E is the kinetic energy for the circular motion.
Mg = C2/(mr03) = mv2/r0,
Mg is the force responsible for the centripetal acceleration.
(c) The angular momentum about the vertical axis is a constant of motion.
The energy E is a constant of motion.
Problem:
A rigid wire shaped like an upside-down L is spinning about its vertical
segment as shown in the figure.
The angular velocity of the motion is Ω. A bead of mass m is
constrained to slide without friction on the horizontal segment of the wire and
is connected by a massless string to an identical bead on the vertical segment.
The string has constant length l and follows the shape of the wire without
friction. The bead on the vertical segment is subjected to gravity (g
is downward).
Consider only situations when this geometry is valid.
(a)
In terms of the distance r of the revolving bead from the center of rotation,
write down the Lagrangian for this system.
(b) Find the equation of
motion for the bead.
(c) Solve the equation of motion for the
trajectory of the bead.
Solution:
- Concepts:
Lagrangian Mechanics
- Reasoning:
We are asked to obtain Lagrange's equation of motion and
solve them..
- Details of the calculation:
(a) T = m(dr/dt)2 + ½mr2Ω2,
U = -mg(l - r).
L = T - U = m(dr/dt)2 + ½mr2Ω2
+ mg(l - r).
(b) We have only one generalized coordinate, r.
d/dt(∂L/∂(dr/dt)) - ∂L/∂r = 0.
∂L/∂(dr/dt) = 2m(dr/dt),
d/dt(∂L/∂(dr/dt)) = 2m d2r/dt2.
∂L/∂r = mrΩ2
- mg.
d2r/dt2 = ½rΩ2 - ½g is the
equation of motion.
(c) d2r/dt2 = ar - b.
Let
r' = a(r - b/a), d2r'/dt2 = ar'.
r'(t) = C1exp((√a)t)
+ C2exp(-(√a)t).
r(t) = C1exp((√a)t) + C2exp(-(√a)t)
+ b/a.
The constants C1 and C2 are determined by
the initial conditions.
Problem:
Consider the double pendulum consisting of two massless rods of length L = 1
m and two point particles of mass m = 1 kg in free space, with a fixed pivot
point.
(a) Write down the Lagrangian of the system shown in terms of the
coordinates θ and α shown and the corresponding velocities.
(b) Find two conserved quantities.
(c) Write down the second-order differential equations of motion.
Solution:
- Concepts:
Lagrangian mechanics
- Reasoning:
If one of the coordinates is cyclic, the conjugate momentum is conserved.
- Details of the calculation:
(a) L = T = ½ v12 + ½ v22
x1 = sin(θ), y1 = cos(θ), x2 = sin(θ) +
sin(θ + α), y2 = cos(θ) + cos(θ + α)
v12 = (dθ/dt)2,
v22 = (dθ/dt)2 + (dθ/dt + dα/dt)2
+ 2(dθ/dt)(dθ/dt + dα/dt)cos(α)
L = (dθ/dt)2 + ½(dθ/dt + dα/dt)2 + (dθ/dt)(dθ/dt
+ dα/dt)cos(α)
(b) θ is cyclic, pθ = constant.
pθ = ∂L/∂((dθ /dt)) = 2(dθ/dt) + (dθ/dt + dα/dt) + (dθ/dt + dα/dt)cos(α)
+ (dθ/dt)cos(α)
= 3(dθ/dt) + (dα/dt) + 2(dθ/dt)cos(α) + (dα/dt)cos(α) = constant.
L = T = E does not explicitly depend on time.
E = (dθ/dt)2 + ½(dθ/dt + dα/dt)2 + (dθ/dt)(dθ/dt
+ dα/dt)cos(α) = constant.
(c) dpθ/dt = 0, ∂L/∂((dα/dt)) - ∂L/∂α = 0.
This yield the two second order equations of motion below.
(d2θ/dt2)(3 + 2 cos(α)) + (d2α/dt2)(1
+ cos(α)) - 2(dθ/dt) (dα/dt)sin(α) - (dα/dt)2sin(α) = 0.
(d2θ/dt2) + (d2α/dt2)cos(α) +
(dθ/dt)2 sin(α) = 0.
Problem:
A particle of mass equal to 3 kg moves in the xy plane. The potential
energy of the particle as a function of position is given by U = (36 J/m2)xy
- (48 J/m2)x2. The particle starts at time t = 0
from rest at the point with position vector (x, y) = (10 m, 10 m).
(a)
Set up the differential equations describing the motion and solve them to
determine the position of the particle as a function of time.
(b) Find
the velocity as a function of time.
Solution:
Problem:
Obtain Lagrange's equations of motion for a spherical pendulum (a mass point
suspended by a rigid, weightless rod).
Solution:
- Concepts:
Lagrange's Equations: d/dt(∂L/∂(dqj/dt)) -
∂L/∂qj = 0; generalized coordinates
- Reasoning:
We are asked to obtain Lagrange's equation of motion. Let
g point into the -z direction.
The system has only two degrees of freedom. Choose the generalized
coordinates to be θ and Φ. The constraints are holonomic, the applied
forces are conservative.
- Details of the calculation:
d/dt(∂L/∂(dqj/dt)) - ∂L/∂qj
= 0, and q1 = θ, q2 = Φ.
L = T - U
T = ½m(r2(dθ/dt)2
+ r2sin2θ(dΦ/dt)2), U = mg r cosθ.
∂L/∂(dθ/dt) = mr2 dθ/dt,
d/dt(∂L/∂(dθ/dt)) = mr2
d2θ/dt2,
∂L/∂θ = mr2
sinθ
cosθ(dΦ/dt)2 + mg r sinθ.
∂L/∂(dΦ/dt) = mr2 sin2θ
dΦ/dt,
d/dt(∂L/∂(dΦ/dt)) = mr2 sin2θ d2Φ/dt2
+ 2mr2 sinθ cosθ dθ/dt dΦ/dt,
∂L/∂Φ = 0.
In this problem Φ is cyclic, ∂L/∂(dΦ/dt) is a constant of motion.
sin2θ(dΦ/dt) = constant = C. dΦ/dt = C/sin2θ.Equations of motion (second order differential equations):
d2θ/dt2
= sinθ cosθ(dΦ/dt)2 + (g/r)sinθ = (cosθ/sin3θ)C2
+ (g/r)sinθ.
d2Φ/dt2 = -2 dΦ/dt dθ/dt cotθ = 2 C
dθ/dt (cosθ/sin3θ) = 0.
Note:
Because Φ is cyclic, we already have a first integral.
We can insert dΦ/dt = C/sin2θ into the expressions for d2θ/dt2
and d2Φ/dt2.
Problem:
Consider a bead of mass m sliding freely on a smooth circular wire of radius
b which rotates in a horizontal plane about one of its points O, with constant
angular velocity Ω. Let θ be the counterclockwise angle between the diameter
that passes through the mass and the diameter that passes through the point O,
with θ = 0 the case where the mass is farthest from O.

(a) Find the equation of motion for θ. Compare this equation with
the equation of motion for a simple pendulum (point mass and massless rod).
(b) For the initial conditions θ = 0, dθ/dt = ω0 at t = 0,
describe the θ motion that occurs for |ω0| < 2Ω and for |ω0|
> 2Ω. (Note: The same equations have the same solutions.)
(c)
Describe the θ motion that occurs for |ω0| << 2Ω.
(d) Find the
force that the wire exerts on the bead as a function of θ and dθ/dt.
Solution:
- Concepts:
Lagrangian Mechanics
- Reasoning:
All forces except the forces of constraint are derivable
from a potential. The Lagrangian formalism is well suited for such a
problem.
- Details of the calculation:
(a) Let Ωt be the angle between the
diameter going through the rotation point O and the x-axis. Then we may
write the Cartesian coordinates of the mass as
x = bcos(Ωt) + bcos(θ +
Ωt), y = bsin(Ωt) + bsin(θ + Ωt).
T = ½m((dx/dt)2 + dy/dt)2)
= ½mb2(Ω2 + (Ω + ω)2 + 2Ω(Ω + ω) cosθ),
where ω = dθ/dt.
L = T.
Lagrange's equation d/dt(∂L/∂ω) - ∂L/∂θ = 0
yields
d2θ/dt2 + Ω2sinθ = 0. A simple
pendulum has the same equation of motion if we let Ω2 = g/ℓ.
(b) Using the simple pendulum (point mass on a massless rod) as a guide
we know that the θ motion is oscillatory if ½mℓ2ω02
< 2mgℓ, or ω02 < 4g/ℓ and the θ motion is circular if
ω02 < 4g/ℓ. So for our problem the θ motion is
oscillatory if ω02 < 4Ω2 and the θ motion
is circular if ω02 < 4Ω2.
(c) If |ω0|
<< 2Ω then sin(θ) ≈ θ and we have simple harmonic motion with a period T =
2π/Ω that does not depend on the amplitude.
As |ω0| increases,
and approaches 2Ω the period increases and becomes very long near |ω0| ≈
2Ω.
For |ω0| > 2Ω the period (of the now circular motion)
increases again and approaches T = 2π/|ω0| for |ω0| >>
2Ω.
(d) Use Lagrange multipliers. Let r become a generalized
coordinate.
x = bcos(Ωt) + rcos(θ + Ωt), y = bsin(Ωt) + rsin(θ + Ωt).
T = ½m(b2Ω2 + (dr/dt)2 + r2(Ω +
ω)2 + 2bΩ(dr/dt)sinθ + 2brΩ(Ω + ω) cosθ) = L.
The equation of
constraint is r = b, dr = 0,
λ1(a1r dr + a1θ
dθ) = 0, a1r = 1, a1θ = 0.
Lagrange's
equation for the r degree of freedom is d/dt(∂L/∂vr) - ∂L/∂r = λ1a1r
= λ1.
λ1 = Fr, the force that the wire
exerts on the bead.
Fr = -mb[Ω2cosθ + (Ω + ω)2].
Problem:
A bead, of mass m, slides without friction on a wire that is in the shape of
a cycloid with equations
x = a(2θ + sin2θ),
y = a(1 - cos2θ),
- π/2 ≤ θ
≤ π/2.

A
uniform gravitational field g points in the negative y-direction.
(a) Find the Lagrangian and the second order differential equation of
motion for the coordinate θ.
(b) The bead moves on a trajectory s with
elements of arc length ds.
Integrate ds = (dx2 + dy2)½
= ((dx/dθ)2 + (dy/dθ)2)½dθ with the condition s
= 0 at θ = 0 to find s as a function of θ.
(c) Rewrite the equation of
motion, switching from the coordinate θ to the coordinate s and solve it.
Describe the motion.
Solution:
- Concepts:
Lagrangian Mechanics
- Reasoning:
We are asked to obtain Lagrange's equation of motion,
using two different generalized coordinates.
- Details of the calculation:
(a) L = T - U. T = ½m(vx2
+ vy2), vx = dx/dt = 2a(dθ/dt)(1 +
cos2θ),
vy = dy/dt = 2a(dθ/dt)sin2θ.
T = 2ma2(dθ/dt)2[(1
+ cos2θ)2 + sin22θ] = 4ma2(dθ/dt)2(1
+ cos2θ)
= 8ma2(dθ/dt)2cos2θ.
U =
mgy = mga(1 - cos2θ) = 2mga sin2θ.
L = 8ma2(dθ/dt)2cos2θ
- 2mga sin2θ.
Lagrange's equations: d/dt(∂L/∂(dqi/dt))
- ∂L/∂qi = 0.
We have only one generalized coordinate.
∂L/∂(dθ/dt)) = 16ma2(dθ/dt)cos2θ.
d/dt(∂L/∂(dθ/dt))
= 16ma2d2θ/dt2cos2θ - 32ma2(dθ/dt)2cosθ
sinθ.
∂L/∂θ = -16ma2(dθ/dt)2cosθ sinθ - 4mga cosθ
sinθ.
Equation of motion:
16ma2d2θ/dt2cos2θ
- 16ma2(dθ/dt)2cosθ sinθ + 4mga cosθ sinθ = 0.
d2θ/dt2cosθ
- (dθ/dt)2sinθ + (g/(4a)) sinθ = 0.(b) ds = 4a
cosθ dθ. s(θ) = ∫0θds = ∫0θ4a
cosθ'dθ' = 4a sinθ.
(c) ds/dt = 4a cosθ (dθ/dt). d2s/dt2
= 4a cosθ d2θ/dt2 - 4a sinθ
(dθ/dt)2.
Therefore d2θ/dt2 cosθ -
(dθ/dt)2 sinθ = (4a)-1d2s/dt2,
and (g/(4a))sinθ = (g/(4a)2)s.
The equation of motion in terms of the coordinate s is d2s/dt2
= -(g/(4a))s.
This is Hooke's law with the solution s(t) = s0
cos(ωt + φ).
ω = (g/(4a))½, s0 and φ depend on the initial
conditions.
The bead executes simple harmonic motion in s.